My Hacks
- Omni-Presence
- MFScanner
- EmoBot - Realtime CV on Embedded Hardware
- Semi-Autonomous Control of Quadrotor
- LOCK
- Modelling and Feedback Linearization of Aero-Thrust Pendulum
- Magnetic Levitation System
- Digital Painter
- VL Anime Downloader (VLAD) using Wxpython
Omni-Presence
Team Members: Saipraveen Durairaman, Sibi Sankar, Vijayenthiran
- Constructed a omni-directional modular robotics platform designed and implemented using rapid proto- typing techniques.
- Gesture Based Manual Control of the robot was established using RGBD camera though hand detection and tracking (Nite 2.0) (Open Ni 2.2).
- Head Tracking for Virtual Reality was achieved using on-board sensors on the phone to control the stepper-motor on the omnipresence robot.
MFScanner
R&D Intern at Mango Ventures LLP
- Modified FabScan to run on Marlin Firmware to support Auto-Callibration using Horus GUI.
- Extended Horus Firmware to run upto three motors increasing accuracy.
EmoBot - Realtime CV on Embedded Hardware
Team Members: Adithya S, Sibi Sankar
- Facial landmarks were detected using dlib library and feature set was extracted from several face datasets and run realtime on raspberry pi2.
- Q-Learning (RL Algorithm) was used to reccommend music using the user emotion feedback.
- Placed top 5 at Harman Connected Car Hackathon.
Semi-Autonomous Control of Quadrotor
Team Members: Sibi Sankar, Sanjay Shreedharan
- Responsible for implementation of the two-channel PID controller for roll and pitch control of a quadcopter on Spartan 3E FPGA using Matlab/Xilinx(ISE).
- Aided in the indigenous construction of the quadcopter frame and interfacing of the 9 degree of freedom inertial measurement unit with the FPGA.
- Aided in the testing and implementation of the control algorithm in arduino microcontroller.
LOCK
(Localization, Obstacle avoidance , Control and Kinematic framework)
mentor - Prof. M.Senthil Kumaran (EEE/SSNCE)
Sibi Sankar, Sanjay Shreedharan, Adithya S
- Implemented Localization and Pose estimation based on arbitrary defined color contours detection using OpenCV C++ library.
- Implemented A* based search on the image to find the optimal path through a obstacle maze.
- Implemented a PID based control system based on the kinematics of the differential driving system.
Modelling and Feedback Linearization of Aero-Thrust Pendulum
mentor- Prof. M.Senthil Kumaran (EEE/SSNCE)
Sibi Sankar, Sanjay Shreedharan
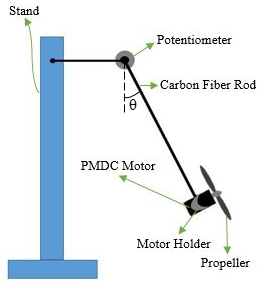
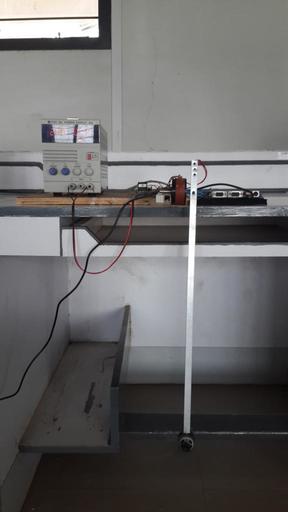
- Responsible for implementation of the single-channel PID controller with anti-reset for aero-thrust pendulum on Spartan 3E FPGA using Matlab/Xilinx(ISE)
- As a part of a team of two, implemented the data logging system on Spartan 3E FPGA interfaced to Matlab through Real time Windows target and aided in feedback-linearization of the non-linear system.
- Facilitated the implementation of the online tuning of PID parameters with on-board switch of the FPGA.
Magnetic Levitation System
mentor - Prof. M.Senthil Kumaran (EEE/SSNCE)
Sibi Sankar, Sanjay Shreedharan, Adithya S
- Designed a Prototype of Magnetic Levitation System.
- Implemented Hysteresis Control to achieve magnetic levitation using Spartan 3E FPGA and Arduino.
Digital Painter
mentor - Prof. M.Senthil Kumaran (EEE/SSNCE)
Adithya S, Sibi Sankar, Sanjay Shreedharan
- Implemented mathematical functions on Spartan 3E FPGA and used PWM technique to display basic shapes in a DSO.
- Developed a technique to display any given image in a DSO with the help of image processing and python.
Checkout the blog post about this project here
VL Anime Downloader (VLAD) using Wxpython

- Responsible for the download link extraction algorithm and multi-threaded downloader implementation.
- Implemented a GUI based data scraping, multithreaded downloader using WxPython for anime shows and its source code was published in github